在世界各地,每时每刻都有各种各样的吊车在运转。码头(海运码头和内河码头)、储运仓库、冶金企业、铸造厂等,几乎都依靠各种吊车进行装舱、卸货、吊运。在吊车上安装电子称量系统,有以下优点:
(1)在吊运作业中进行称量,可实现货物直接交付,加速进仓盘货,节省大量时间。
(2)不另外占用称量空间和时间。
(3)一台吊车秤的价格要比一台平台秤便宜得多。
(4)配上先进仪表,可同计算机联网,进行作业得程序控制。
吊钩秤是一个自成系统的、专用于起重机械的电子衡器。它不需要对原来的其中设备进行改造,在应用上又有很大的灵活性,所以近年来也得到了普遍应用。
门式起重机是各工矿企业应用最多的一种起重设备。以炼钢厂为例,一个炼钢厂就拥有十多台门式吊车。依量程大小、制造年代、引入国家的不同,在基本结构类似的情况下,又有多种形式,图2.4.1为其卷扬系统的典型图例。
1.门式起重机的称量特点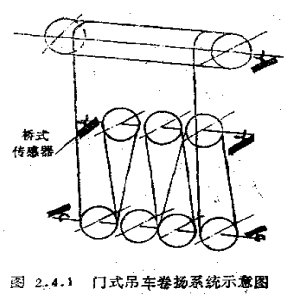
实现门式起重机在吊运重物的同时进行准确称量,是几年来人们所一直探索的课题。实践证明,我们现已能达到的称量计数水平与人们期望得到的目标商有相当的距离。这是因为电子吊车秤与电子平台秤相比有以下特点:
(1)假如把电子吊车秤模拟秤一台安装在房顶的电子台秤,那么我们不难理解两者之间的一个明显差别,吊车秤的底座在吊运作业中是在不停地改变水平状态地;其偏转的大小决定于吊车原设计的刚度和吊车的安装质量。
门式起重机的横梁跨巨大,衡行车起吊重物后横梁挠度大,横行位置不同,其“秤座”的偏转是前后不一的。
横梁纵向行走范围大(超过50m),两条走行轨道的安装水平状态原来就存在一定误差,运行一段时间后,可能扩大误差。因此吊车横梁在移动时,“秤座”的位置会再次产生偏转。
总所周知,电子秤秤座的水平状态会直接影响重力方向与传感器计量轴线之间的偏转,从而会影响称量精度。
(2)被称量重物的摆动和旋转。
重物起吊后,由于起吊重物的重心与吊挂支点不垂直,必然引起重物的摆动和旋转。由于运动过程中收到机械摩擦和空气阻尼等因素的影响,致使重力按一条衰减的正弦波变化,所以,电子吊车秤要得到一个稳定读书,必然需要一个相当长的采样时间。
(3)被称量重物的加速度和冲击。
吊车卷扬筒收放钢缆时,重物因附加速度变化引起的重力同向的附加力值很客观。刹车时,因重物惯性运动还会对传感器产生称量方向的冲击力,吊车平移运动时,重物水平方向的加速度也会产生垂直分量。
(4)刚生传动系统的摩擦力、夹角变化及钢绳自重的变化。
吊车的提升高度为18m左右,钢绳往返滑轮较多,因此重物计量受到钢绳自重和传动系统摩擦力的影响。卷扬筒、定滑轮及下面的动滑轮构成一个夹角不断变化的三角形,对上面两支点的作用力也随起吊高度的改变而不断变化,
(5)称量过程中几乎始终伴随着复杂的振动。
吊车、钢丝绳、传感器构成一个弹性振动系统。其中吊车大梁的振动频率在3.5~5Hz之间,钢绳的颤动频率较为复杂,其纵向振动估算公式为:

横向振动按县振动基频计算公式为:

式中:
估计合成后的钢绳颤动频率在10~15Hz范围内,致使传感器受到多变的振动力(其中g为重力加速度,L为摆长)。
鉴于重物起吊后运动状态和传感器受力状态的复杂性,组件要在运动状态下精确计量物料重量,是一个有待突破的技术难题。
国外先进工业国家的吊车秤,也都规定重物起吊后要给予一定的采样时间。由于吊车秤在工业现场中巨大的实用价值,所以许多科技人员为克服这些不利因素做出了卓越的努力,并取得了不少成功的经验。
2.称重传感器安装在动滑轮两端的组秤计数
这种设置方案的优点是传感器直接承受起吊重物的全部重量,不受吊车横梁挠度、重物提升高度、钢绳传动系统摩擦力等因素的影响,因此具有很高的计量精度。
图2.4.2为瑞典FLINAB公司研制的新型吊车秤。起吊重物的重量通过两侧钢板挂在左右两只传感器的四只加载荷座商,钢丝绳通过动滑轮轴,加负荷与两只双剪切梁传感器的中间承载平面上。传感器电缆由装在横跑车上的电缆同步收放装置进行收放。
图2.4.3所示为焊接到原动滑轮侧板上的一个零件。内部型腔中的左右两个突起台阶能对传感器起横向限位作用,顶端台阶起传感器过载保护作用。图2.4.4为桥式传感器的外形图及它与动滑轮轴的组合位置图。图2.4.5为桥式传感器的受力状态图。总体组装完成后,侧板外平面上在加复保护盖板。这种吊车秤静指标能达到3000分度,满足国际法制计量组织三级商用秤的计量要求。
图2.4.6为国内生产的两只桥式传感器反向支承动动滑轮轴构成的电子吊车秤。这个方案需对原设备作一些改造,另换一根加长的动滑轮轴,增加一副传感器的支承架。
3.称重传感器安装在定滑轮两端的组秤技术
这个方案经多年探索,已为许多冶金企业所采用,并获得了很好的称重效果。吊车改造后所能达到的计量精度,决定于下列技术细节。
(1)支承定滑轮轴的桥式传感器,必须采用鱼背式截面的轴孔支承结构(见图2.4.7)

因为定滑轮轴与两端桥式传感器支承孔槽之间,在现场安装要做到绝对水平和同心、使复合呈均布接触状态是不可能的。及时安装得到绝对水平和同心,在载荷作用下一旦轴产生挠度,也会使力点产生偏移,从而引起相当大的称量误差。鱼背式截面承载能适应这两种不可避免地变化。它与定滑轮轴之间能失重保持中心地点接触,还能保证力作用点和力作用线地基本不变。鱼背式承载结构能取得很高地标定精度。
(2)定滑轮轴径向、轴向限位器的设计技术。
在重物吊运中,定滑轮轴肯定会受到径向、轴向的水平分力。为保证设备安全和作业安全,必须设置定滑轮轴的限位器。实践证明,限位器设置是都合理,直接关系到称量效果。
图2.4.8所示为一种施工方便而又不会引入误差的限位方法。其中径向间隙α应在3-5mm之间,轴向间隙β应在2-3mm之间。不饿合理的限位装置,会因卡板与轴之间的摩擦力而严重影响计量精度。
在门市吊车改造中,还常碰到某些吊车的定滑轮与箱体侧板间距小于60mm而无法安装桥式传感器的情况。此时可采用环式吊板吊挂定滑轮轴,然后再横跑车上安装鱼背截面桥式传感器来解决。

4.称重传感器安装在横行车框架下的组秤技术
 图2.4.12为称重传感器安装在小跑车下的电子吊车秤示意图。这个方案的优点是能采样起吊重物的全部重量,并且不随起吊高度的变化而变化,不受钢丝绳在运动中产生的摩擦力的影响,由于传感器离起吊物有较长的距离,所以可用于热物料的吊运计量。
图2.4.12为称重传感器安装在小跑车下的电子吊车秤示意图。这个方案的优点是能采样起吊重物的全部重量,并且不随起吊高度的变化而变化,不受钢丝绳在运动中产生的摩擦力的影响,由于传感器离起吊物有较长的距离,所以可用于热物料的吊运计量。
实践证明,当横行车启动、刹车、运行时,称量架的水平冲力及水平加速度力会严重干扰计量精度。此外,横梁的挠度会使称量框架的水平状态变化,从而影响称量精度并引入水平方向干扰力。所以,称量框架中间必须安装球柱式水平限位器,限位间隙控制在0.3-0.5mm,使水平限位球面柱承担上述所有水平方向的力值。四个支承式传感器,采用钢球-球窝支承结构,或采用摇杆式传感器,允许左右摆晃1~2度,从而消除了水平冲击的干扰。
5.称重传感器安装在卷扬筒一侧的超载保护技术。
为保证设备和作业安全,起重设备必须安装超载保护装置。如图2.4.13所示,该称重装置对原有门吊的改造工作量小,而能稳定可靠地实现超载报警,自动切断起升电机的主回路。对大吨位门吊。也可在卷扬筒轴座下,左右纵向安装两只平面桥式传感器来解决超载保护问题。
6.称重传感器安装在横行大梁钢轨下的组秤技术
笔者曾设计了一种长500mm的特殊平面传感器——铁轨形桥式传感器。按轮距把四个这样的传感器串接在横行车行铁轨上,就可对起吊重物进行计量。这种组秤方法的优点式结构简单,电缆可固定布线,无须收放,秤座水平状态相对一致。缺点是横行车必须人为的开到计量轨上来过秤,增加司机操作上的困难,其横梁端部必须安置缓冲定位装置。
上一篇:称重传感器的激励电压是什么?
下一篇:称重传感器在平台秤中的应用






